設定ガイド (Configuration Guide)
バージョン: v3.2.5
Copyright (c) 2026 Masanori Sakai
Licensed under the MIT License
概要
このガイドでは、流星検出システムの各種設定方法とチューニング手法について説明します。
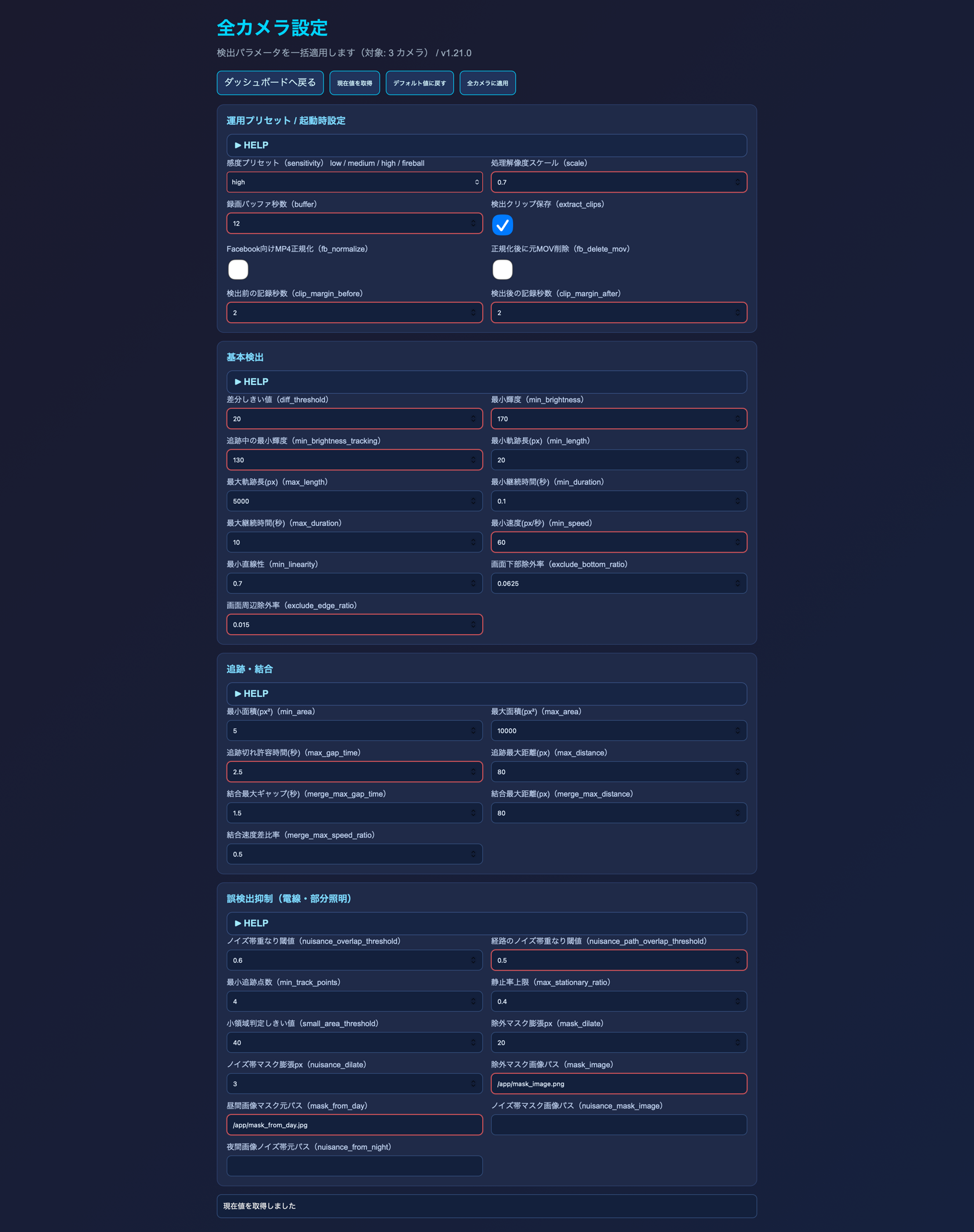
サンプル画面
全カメラ設定ページの例です。
目次
- 環境変数
- マスク設定(固定カメラ向け)
- ノイズ帯マスク設定(v1.12.0+)
- 検出パラメータ
- 感度プリセット
- 処理スケール設定
- 天文薄暮時間帯設定
- ハードウェア別推奨設定
- チューニング方法
- バージョン別新機能
環境変数
カメラコンテナの環境変数
docker-compose.ymlで設定される環境変数:
| 変数名 | デフォルト値 | 説明 | 設定例 |
|---|---|---|---|
TZ |
Asia/Tokyo |
タイムゾーン | America/New_York |
RTSP_URL |
- | RTSPストリームURL | rtsp://user:pass@10.0.1.25/live |
CAMERA_NAME |
camera |
カメラ識別名 | camera1_10_0_1_25 |
SENSITIVITY |
medium |
検出感度 | low / medium / high / fireball |
SCALE |
0.5 |
処理スケール | 0.25 ~ 1.0 |
BUFFER |
15 |
リングバッファ秒数(RTSP Webは検出前後1秒+最大検出時間に上限調整) | 10 ~ 30 |
EXCLUDE_BOTTOM |
0.0625 |
画面下部除外率 | 0.0 ~ 0.25 |
EXTRACT_CLIPS |
true |
クリップ動画保存 | true / false |
LATITUDE |
35.3606 |
観測地の緯度 | 35.6762(東京) |
LONGITUDE |
138.7274 |
観測地の経度 | 139.6503(東京) |
TIMEZONE |
Asia/Tokyo |
タイムゾーン名 | UTC / Europe/London |
ENABLE_TIME_WINDOW |
true |
天文薄暮時間帯制限 | true / false |
WEB_PORT |
8080 |
内部HTTPポート | 通常変更不要 |
MASK_IMAGE |
"" |
事前生成済みマスク画像(優先) | /app/mask_image.png |
MASK_FROM_DAY |
"" |
昼間画像からマスク生成 | /app/mask_from_day.jpg |
MASK_DILATE |
20 |
マスク拡張ピクセル数 | 10 / 30 |
MASK_SAVE |
"" |
マスク保存先 | /output/masks/camera1_mask.png |
NUISANCE_MASK_IMAGE |
"" |
ノイズ帯マスク画像(v1.12.0+) | /app/nuisance_mask.png |
NUISANCE_FROM_NIGHT |
"" |
夜間画像からノイズ帯マスク生成(v1.12.0+) | /app/nuisance_night.jpg |
NUISANCE_DILATE |
3 |
ノイズ帯マスク拡張ピクセル数(v1.12.0+) | 2 / 5 |
NUISANCE_OVERLAP_THRESHOLD |
0.3 |
ノイズ帯重複率閾値(v1.12.0+) | 0.2 ~ 0.5 |
EXCLUDE_EDGE_RATIO |
0.0 |
画面四辺除外率(v1.16.0+) | 0.0 ~ 0.2 |
ダッシュボードの環境変数
| 変数名 | デフォルト値 | 説明 |
|---|---|---|
PORT |
8080 |
HTTPサーバーポート |
LATITUDE |
35.3606 |
観測地の緯度 |
LONGITUDE |
138.7274 |
観測地の経度 |
TIMEZONE |
Asia/Tokyo |
タイムゾーン名 |
ENABLE_TIME_WINDOW |
true |
天文薄暮時間帯制限 |
CAMERA1_NAME |
- | カメラ1の内部名(ディレクトリ名・識別子) |
CAMERA1_NAME_DISPLAY |
- | カメラ1のWeb表示名(UI専用。保存先ディレクトリや runtime_settings のファイル名には使われない) |
CAMERA1_URL |
- | カメラ1のURL |
CAMERA1_STREAM_KIND |
webrtc |
ライブ表示方式 (mjpeg / webrtc) |
CAMERA1_STREAM_URL |
CAMERA1_URL |
ライブ表示用URL (webrtc 時は http://localhost:1984/stream.html?src=camera1&mode=webrtc&mode=mse... など。埋め込み時はダッシュボード表示中のホスト名を優先して接続) |
DETECTIONS_DIR |
/output |
検出結果ディレクトリ |
CAMERA_HEALTH_INTERVAL |
10 |
カメラ生存確認間隔(秒) |
CAMERA_TIMEOUT |
5 |
カメラ応答タイムアウト(秒) |
環境変数の設定方法
方法1: generate_compose.pyで一括設定
python generate_compose.py \
--streamers streamers \
--sensitivity high \
--scale 0.5 \
--buffer 15 \
--streaming-mode webrtc \
--latitude 35.6762 \
--longitude 139.6503 \
--enable-time-window true \
--extract-clips true \
--mask-output-dir masks
方法2: docker-compose.ymlを直接編集
services:
camera1:
environment:
- SENSITIVITY=high
- SCALE=0.5
- EXTRACT_CLIPS=false
dashboard:
environment:
- CAMERA1_STREAM_KIND=webrtc
- CAMERA1_STREAM_URL=http://localhost:1984/stream.html?src=camera1&mode=webrtc&mode=mse&mode=hls&mode=mjpeg&background=false
webrtc を Docker 内の go2rtc で使う場合は、go2rtc.yaml の webrtc.candidates にブラウザから到達可能なホスト側 IP/ポートを設定してください。generate_compose.py は既定でローカル IP を自動検出して設定し、必要な場合だけ --go2rtc-candidate-host <host-ip> で上書きできます。
go2rtc は webrtc.candidates で指定した host candidate に加えて、STUN 由来の srflx candidate を返すことがあります。srflx がログやブラウザ開発者ツールに見えても異常ではありません。重要なのは、同時に指定した host candidate も返っており、最終的な表示モードが RTC になっていることです。
方法3: .envファイルを使用
# .env ファイルを作成
cat > .env << 'EOF'
# 全カメラ共通設定
SENSITIVITY=medium
SCALE=0.5
BUFFER=15
EXTRACT_CLIPS=true
# 観測地点
LATITUDE=35.6762
LONGITUDE=139.6503
ENABLE_TIME_WINDOW=true
# RTSP認証情報(セキュリティ向上)
RTSP_USER=username
RTSP_PASS=password
EOF
chmod 600 .env # パーミッション制限
docker-compose.ymlで参照:
environment:
- SENSITIVITY=${SENSITIVITY:-medium}
- RTSP_URL=rtsp://${RTSP_USER}:${RTSP_PASS}@10.0.1.25/live
ダッシュボード一括設定(再ビルド不要) v1.13.0+
/settings から全カメラへ設定を一括反映できます。
GET /settings: 設定UIGET /camera_settings/current: 現在値取得POST /camera_settings/apply_all: 全カメラ一括反映
反映タイミング
即時反映(再起動不要):
- 検出パラメータ: diff_threshold, min_brightness, min_linearity, min_length, min_speed, min_duration, max_duration, min_area, max_area
- ノイズ除外パラメータ: nuisance_overlap_threshold, nuisance_path_overlap_threshold, min_track_points, max_stationary_ratio, small_area_threshold
- 録画マージン設定(v1.14.0+): clip_margin_before, clip_margin_after
- マスク設定: mask_dilate, nuisance_dilate, mask_*, nuisance_* の画像パス
- 画面端除外(v1.16.0+): exclude_edge_ratio
自動再起動で反映(再ビルド不要):
- 基本設定: sensitivity, scale, buffer, extract_clips
永続化
起動時依存の設定は output/runtime_settings/<camera>.json に保存されます。
これにより、コンテナ再起動後も同じ設定が維持されます。
<camera> には CAMERA_NAME の内部名が使われ、CAMERA_NAME_DISPLAY の表示名には切り替わりません。
設定変更の推奨手順
- ダッシュボードの
/settingsページにアクセス - 変更したいパラメータを入力(差分のみハイライト表示)
- 「全カメラに適用」ボタンで一括反映
- 即時反映項目はリアルタイムで適用、再起動項目は自動で再起動
output/runtime_settings/<camera>.jsonに永続化され、次回起動時も有効
マスク設定(固定カメラ向け)
streamers に昼間画像を指定
streamers で RTSP URL | 昼間画像 の形式にすると、generate_compose.py 実行時に
除外マスクを自動生成してコンテナに同梱します。
rtsp://user:pass@10.0.1.25/live | camera1.jpg
rtsp://user:pass@10.0.1.3/live | camera2.jpg
rtsp://user:pass@10.0.1.11/live
- 画像パスは
streamersと同じフォルダ基準(相対パス可) - マスク生成には OpenCV が必要
その場でマスクを更新(永続化)
ダッシュボードの「マスク更新」ボタンで、現在フレームからマスクを再生成できます。
保存先は /output/masks/<camera>_mask.png です。
ノイズ帯マスク設定(v1.12.0+)
概要
ノイズ帯マスク機能は、電線や部分照明など、動かない明るい線状物体による誤検出を防ぎます。 通常のマスクと異なり、ノイズ帯と軌跡が重複した場合のみ除外判定を行います。
設定パラメータ
| パラメータ | デフォルト値 | 説明 | 推奨値 |
|---|---|---|---|
nuisance_mask_image |
"" |
事前生成済みノイズ帯マスク | /app/nuisance_mask.png |
nuisance_from_night |
"" |
夜間画像からマスク自動生成 | /app/nuisance_night.jpg |
nuisance_dilate |
3 |
マスク拡張ピクセル数 | 2 ~ 5 |
nuisance_overlap_threshold |
0.3 |
重複率閾値(軌跡の何%がノイズ帯に重なったら除外) | 0.2 ~ 0.5 |
設定方法
方法1: 環境変数で直接指定
environment:
- NUISANCE_FROM_NIGHT=/app/nuisance_night.jpg
- NUISANCE_DILATE=3
- NUISANCE_OVERLAP_THRESHOLD=0.3
方法2: ダッシュボードから設定(v1.13.0+)
/settingsページにアクセスnuisance_overlap_thresholdを調整(0.2 = 20%重複で除外)- 「全カメラに適用」で即時反映
使用例:電線対策
電線が画面中央を横切る場合:
environment:
- NUISANCE_FROM_NIGHT=/app/night_with_wires.jpg
- NUISANCE_DILATE=5 # 電線を太めに認識
- NUISANCE_OVERLAP_THRESHOLD=0.25 # 軌跡の25%以上が電線に重なったら除外
注意事項
- 夜間画像を使用: 電線や照明が明るく写っている夜間画像が必要
- 通常マスクとの併用: 建物など完全除外したい領域は通常マスクを使用
- 重複率の調整: 値を小さくすると除外が厳しく、大きくすると緩くなる
検出パラメータ
物理量に読み替える目安(天文観測者向け)
検出しきい値はコード上 px / px/s ですが、観測上は「何km・何km/sか」が重要です。
ここでは、ATOM Cam 2 の水平画角を 120度、解像度を 1920x1080 として読み替えます。
前提:
- 水平1pxあたり角度: 120 / 1920 = 0.0625度(約 0.0010908 rad)
- 距離 R km に対して
- 見かけ長さ L ≈ R * 角度(rad)
- 見かけ速度 V ≈ R * 角速度(rad/s)
現在の標準しきい値(medium):
- min_length = 20 px
- min_speed = 50 px/s
距離別の換算目安:
| 想定距離 R | 最小検出長(20px) | 最小見かけ速度(50px/s) |
|---|---|---|
| 100 km | 約 2.18 km | 約 5.45 km/s |
| 200 km | 約 4.36 km | 約 10.91 km/s |
| 300 km | 約 6.55 km | 約 16.36 km/s |
読み方:
- 距離が遠いほど、同じ px でも実距離・実速度は大きくなります
- 低空(低仰角)で見える流星は距離が伸びやすく、300km前後になることがあります
- 運用上は「この設定で拾える最低ライン」を km/km/s で把握しておくと調整しやすくなります
DetectionParams クラス
meteor_detector_rtsp_web.py内で定義されるパラメータ:
@dataclass
class DetectionParams:
diff_threshold: int = 30 # 差分閾値
min_brightness: int = 200 # 最小輝度
min_length: int = 20 # 最小軌跡長 (px)
max_length: int = 5000 # 最大軌跡長 (px)
min_duration: float = 0.1 # 最小継続時間 (秒)
max_duration: float = 10.0 # 最大継続時間 (秒)
min_speed: float = 50.0 # 最小速度 (px/s)
min_linearity: float = 0.7 # 最小直線性 (0-1)
min_area: int = 5 # 最小面積 (px²)
max_area: int = 10000 # 最大面積 (px²)
max_gap_time: float = 0.2 # 最大トラッキング間隔 (秒)
max_distance: float = 80 # 最大移動距離 (px)
exclude_bottom_ratio: float = 1/16 # 画面下部除外率
パラメータの詳細説明
diff_threshold(差分閾値)
説明: フレーム間差分の閾値。この値を超える変化を検出対象とする
影響: - 低い値(15-20): 小さな変化も検出 → 感度高、誤検出も増加 - 高い値(40-50): 大きな変化のみ検出 → 感度低、誤検出減少
推奨値: - 明るい環境: 40 - 通常環境: 30 - 暗い環境: 20
調整例:
# コード内で直接変更する場合
params = DetectionParams()
params.diff_threshold = 25 # より敏感に
min_brightness(最小輝度)
説明: 検出対象とする最小の明るさ(0-255)
影響: - 低い値(150-180): 暗い流星も検出 - 高い値(220-255): 明るい流星のみ検出
推奨値: - 市街地(光害あり): 220 - 郊外: 200 - 山間部(光害なし): 180
min_length / max_length(軌跡長)
説明: 検出する軌跡の長さ範囲(ピクセル)
min_length の影響: - 短い(10-15px): 短い軌跡も検出 → 誤検出増加 - 長い(30-50px): 長い軌跡のみ → 見逃し増加
推奨値: - 1920x1080: min=20, max=5000 - 1280x720: min=15, max=3000 - 640x480: min=10, max=2000
min_duration / max_duration(継続時間)
説明: 検出する軌跡の時間範囲(秒)
推奨値: - 通常の流星: min=0.1, max=10.0 - 火球専用: min=0.5, max=20.0
min_speed(最小速度)
説明: 検出する最小移動速度(ピクセル/秒)
影響: - 低い値(20-30): ゆっくり動く物体も検出 → 航空機を誤検出 - 高い値(70-100): 速い物体のみ → 流星の見逃しが増える
推奨値: 50 px/s
参考: 流星の典型的な速度は100-500 px/s
min_linearity(最小直線性)
説明: 軌跡の直線度合い(0.0-1.0)。1.0が完全な直線
影響: - 低い値(0.5-0.6): 曲がった軌跡も検出 - 高い値(0.8-0.9): ほぼ直線のみ検出
推奨値: 0.7
計算方法: 主成分分析(PCA)による固有値比
exclude_bottom_ratio(画面下部除外率)
説明: 画面下部の除外範囲(0.0-1.0)
用途: 地上の建物や木などの誤検出を防ぐ
推奨値: - 空のみ撮影: 0.0 - 地平線が写る: 0.0625(1/16) - 建物が多い: 0.125(1/8)
例:
画面高さ 1080px × 0.0625 = 下から67.5px を除外
exclude_edge_ratio(画面四辺除外率) v1.16.0+
説明: 画面四辺(上下左右)からの除外割合(0.0-0.2)
用途: 画面端のノイズや歪みによる誤検出を防ぐ
影響: - 0.0(デフォルト): 除外なし - 0.05: 各辺から5%を除外 - 0.1: 各辺から10%を除外 - 0.2(最大): 各辺から20%を除外
推奨値: - 通常運用: 0.0 - 画面端ノイズあり: 0.05 - 魚眼レンズ(歪み大): 0.1
設定方法:
# generate_compose.pyで設定
python generate_compose.py --exclude-edge-ratio 0.05
# docker-compose.ymlで設定
environment:
- EXCLUDE_EDGE_RATIO=0.05
# ダッシュボードから即時反映
# /settings ページで exclude_edge_ratio を設定
例:
画面サイズ 1920x1080、EXCLUDE_EDGE_RATIO=0.05 の場合:
- 左右: 1920 × 0.05 = 96px ずつ除外
- 上下: 1080 × 0.05 = 54px ずつ除外
- 有効領域: 1728 × 972px
注意事項:
- exclude_bottom_ratio と併用可能(下部のみさらに除外)
- 値を大きくしすぎると検出範囲が狭まる
clip_margin_before / clip_margin_after(録画マージン設定) v1.14.0+
説明: 検出イベント前後に追加で録画する時間(秒)
用途: 流星の出現直前・直後の状況も記録
デフォルト値:
- clip_margin_before: 0.0秒
- clip_margin_after: 0.0秒
推奨値:
- 標準運用: before=0.5, after=0.5
- 詳細記録: before=1.0, after=1.0
- ディスク節約: before=0.0, after=0.0
設定方法:
# docker-compose.ymlで設定(v1.14.0以降)
environment:
- CLIP_MARGIN_BEFORE=0.5
- CLIP_MARGIN_AFTER=0.5
# ダッシュボードから即時反映(v1.14.0+)
# /settings ページで clip_margin_before, clip_margin_after を設定
使用例:
検出時間 10:00:05.0 ~ 10:00:07.0(2秒間)の場合:
- margin_before=0.5, margin_after=0.5 設定時
- 録画範囲: 10:00:04.5 ~ 10:00:07.5(3秒間)
メリット: - 流星の出現前の空の状態を確認可能 - 複数の流星が連続した場合も記録 - 検出漏れの前後フレームも保存
注意事項: - BUFFER設定より大きい値は無効 - 値を大きくするとファイルサイズが増加
感度プリセット
プリセット一覧
| プリセット | diff_threshold | min_brightness | 用途 | 誤検出率 |
|---|---|---|---|---|
low |
40 | 220 | 明るい流星のみ | 低 |
medium |
30 | 200 | バランス型(推奨) | 中 |
high |
20 | 180 | 暗い流星も検出 | やや高 |
faint |
16 | 150 | 短く暗い流星の取りこぼし低減 | 高 |
fireball |
15 | 150 | 火球専用 | 高 |
プリセットの適用
# generate_compose.pyで設定
python generate_compose.py --sensitivity high
# または docker-compose.ymlで直接設定
environment:
- SENSITIVITY=high
プリセット別の特徴
low(低感度)
特徴: - 明るい流星のみ検出 - 誤検出が最も少ない - 暗い流星は見逃す
推奨環境: - 市街地(光害が多い) - 満月期 - テスト運用時
検出例: - -3等級以上の明るい流星 - 火球
medium(中感度)★推奨
特徴: - バランスの取れた設定 - 多くの環境で良好な結果 - 誤検出と見逃しのバランスが良い
推奨環境: - 郊外 - 標準的な観測環境 - 長期運用
検出例: - 0等級~-3等級の流星 - 一般的な散在流星 - 流星群の流星
high(高感度)
特徴: - 暗い流星も検出 - 誤検出がやや増える - 見逃しが少ない
推奨環境: - 山間部(光害が少ない) - 新月期 - 流星群極大期
検出例: - +2等級~-5等級の流星 - 微光流星
注意点: - 航空機を誤検出する可能性 - ログ確認が必要
fireball(火球専用)
特徴: - 最も敏感な設定 - 長時間・大きな物体を検出 - 誤検出が多い
推奨環境: - 火球専用観測 - 短期集中観測
検出例: - -4等級以上の火球 - 長時間光る流星
追加設定:
max_duration = 20.0 # 長時間OK
min_speed = 20.0 # ゆっくりでもOK
min_linearity = 0.6 # 多少曲がってもOK
処理スケール設定
SCALE パラメータ
説明: フレームを縮小して処理する比率(0.0-1.0)
影響:
| SCALE | 処理サイズ(1920x1080の場合) | CPU使用率 | メモリ使用量 | 検出精度 |
|---|---|---|---|---|
| 1.0 | 1920x1080(等倍) | 100% | 400MB | 最高 |
| 0.5 | 960x540(推奨) | 30% | 200MB | 高 |
| 0.25 | 480x270 | 15% | 100MB | 中 |
推奨設定
flowchart TD
Start["ハードウェア性能"]
CheckCPU{"CPUコア数"}
CheckMem{"メモリ容量"}
CheckCamera{"カメラ数"}
Scale100["SCALE=1.0<br/>最高精度"]
Scale050["SCALE=0.5<br/>推奨"]
Scale025["SCALE=0.25<br/>省リソース"]
Start --> CheckCPU
CheckCPU -->|"8コア以上"| Scale100
CheckCPU -->|"4コア"| CheckMem
CheckCPU -->|"2コア以下"| Scale025
CheckMem -->|"16GB以上"| Scale050
CheckMem -->|"8GB以下"| CheckCamera
CheckCamera -->|"1-2台"| Scale050
CheckCamera -->|"3台以上"| Scale025
style Scale050 fill:#dff6e8
スケール別の特徴
SCALE=1.0(等倍処理)
メリット: - 最高精度 - 小さな流星も検出 - 軌跡が正確
デメリット: - CPU使用率が高い(90-100%) - メモリ消費が大きい - 多数カメラには不向き
推奨環境: - 高性能PC(8コア以上、16GB RAM以上) - カメラ1-2台 - 短期観測
SCALE=0.5(推奨)
メリット: - 精度とパフォーマンスのバランスが良い - CPU使用率30-50% - 多数カメラに対応可能
デメリット: - 微小な流星は検出困難
推奨環境: - 標準的PC(4コア、8GB RAM) - カメラ3-5台 - 長期運用
SCALE=0.25(省リソース)
メリット: - 最も軽い - CPU使用率15-20% - 多数カメラ対応
デメリット: - 検出精度が低下 - 小さな流星は見逃す
推奨環境: - 低スペックPC(2コア、4GB RAM) - カメラ6台以上 - 明るい流星のみ検出
天文薄暮時間帯設定
ENABLE_TIME_WINDOW の仕組み
説明: 天文薄暮期間(前日の日没~翌日の日出)のみ検出を有効化
gantt
title 1日の検出スケジュール
dateFormat HH:mm
axisFormat %H:%M
section 検出OFF
日中(検出無効): done, day, 06:00, 10h
section 検出ON
夜間(検出有効): active, night1, 16:00, 14h
夜間(検出有効): active, night2, 00:00, 6h
設定方法
# generate_compose.pyで設定
python generate_compose.py \
--enable-time-window true \
--latitude 35.6762 \
--longitude 139.6503
# docker-compose.ymlで直接設定
environment:
- ENABLE_TIME_WINDOW=true
- LATITUDE=35.6762
- LONGITUDE=139.6503
- TIMEZONE=Asia/Tokyo
座標の取得方法
方法1: Google Mapsで取得
- Google Mapsで観測地点を右クリック
- 表示される座標をコピー
- 例:
35.6762, 139.6503
方法2: コマンドラインで取得
# curlで現在地の座標を取得
curl -s "https://ipapi.co/json/" | jq '.latitude, .longitude'
主要都市の座標
| 都市 | 緯度 | 経度 |
|---|---|---|
| 東京 | 35.6762 | 139.6503 |
| 大阪 | 34.6937 | 135.5023 |
| 札幌 | 43.0642 | 141.3469 |
| 福岡 | 33.5904 | 130.4017 |
| 那覇 | 26.2124 | 127.6809 |
| 富士山頂 | 35.3606 | 138.7274 |
時間帯の確認
# ダッシュボードのAPIで確認
curl "http://localhost:8080/detection_window?lat=35.6762&lon=139.6503" | jq
# レスポンス例
{
"start": "2026-02-01 16:45:23",
"end": "2026-02-02 06:12:45",
"enabled": true,
"latitude": 35.6762,
"longitude": 139.6503
}
ハードウェア別推奨設定
低スペックPC(2コア、4GB RAM)
environment:
- SENSITIVITY=medium
- SCALE=0.25
- BUFFER=10
- EXTRACT_CLIPS=false # クリップ動画を保存しない
- ENABLE_TIME_WINDOW=true
カメラ数: 最大2台
標準PC(4コア、8GB RAM)★推奨
environment:
- SENSITIVITY=medium
- SCALE=0.5
- BUFFER=15
- EXTRACT_CLIPS=true
- ENABLE_TIME_WINDOW=true
カメラ数: 3-5台
高性能PC(8コア以上、16GB RAM以上)
environment:
- SENSITIVITY=high
- SCALE=0.75
- BUFFER=20
- EXTRACT_CLIPS=true
- ENABLE_TIME_WINDOW=false # 常時検出
カメラ数: 8台以上
Raspberry Pi 4(4GB)
environment:
- SENSITIVITY=low
- SCALE=0.25
- BUFFER=10
- EXTRACT_CLIPS=false
- ENABLE_TIME_WINDOW=true
カメラ数: 最大1台
注意: 長時間運用時はヒートシンク必須
チューニング方法
ステップ1: ベースライン設定
# 推奨設定で開始
python generate_compose.py \
--sensitivity medium \
--scale 0.5 \
--buffer 15
./meteor-docker.sh start
ステップ2: 誤検出の確認
# 1時間運用後、検出結果を確認
ls -lh ./detections/camera1_*/
# ダッシュボードで確認
open http://localhost:8080/
誤検出の種類: - 航空機(点滅する光、ゆっくり移動) - 昆虫(不規則な動き) - 雲の移動(広範囲、ゆっくり) - 車のヘッドライト(画面下部)
ステップ3: 感度調整
誤検出が多い場合
# 感度を下げる
python generate_compose.py --sensitivity low
# または画面下部除外を増やす
python generate_compose.py --exclude-bottom 0.125
見逃しが多い場合
# 感度を上げる
python generate_compose.py --sensitivity high
# さらに短く暗い流星を拾いたい
python generate_compose.py --sensitivity faint
ステップ4: パフォーマンス調整
# リソース使用率を確認
./meteor-docker.sh status
# CPU使用率が高い(70%以上)
python generate_compose.py --scale 0.25
# メモリ使用量が多い
python generate_compose.py --buffer 10
ステップ5: 長期運用
# 1週間運用後の統計
find ./detections -name "*.mp4" | wc -l
# 誤検出率を計算
# 誤検出率 = 誤検出数 / 総検出数
# 目標: 誤検出率 < 20%
環境別チューニング例
市街地(光害あり)
課題: 街灯、車のライト、建物の照明が多い
推奨設定:
environment:
- SENSITIVITY=low
- SCALE=0.5
- EXCLUDE_BOTTOM=0.125 # 下部1/8を除外
- ENABLE_TIME_WINDOW=true
params調整:
params.min_brightness = 220 # 明るい流星のみ
params.min_speed = 70 # 遅い物体を除外
郊外(標準環境)
推奨設定:
environment:
- SENSITIVITY=medium
- SCALE=0.5
- EXCLUDE_BOTTOM=0.0625
- ENABLE_TIME_WINDOW=true
そのままでOK
山間部(光害なし)
課題: 暗い流星も検出したい
推奨設定:
environment:
- SENSITIVITY=faint
- SCALE=0.75
- EXCLUDE_BOTTOM=0.0
- ENABLE_TIME_WINDOW=true
params調整:
params.min_brightness = 150
params.diff_threshold = 16
params.min_area = 5
params.max_distance = 90
トラブルシューティング
検出数が少なすぎる
原因: - 感度が低すぎる - 時間帯設定の問題
対策:
# 感度を上げる
python generate_compose.py --sensitivity high
# さらに取りこぼしを減らす
python generate_compose.py --sensitivity faint
# 時間帯制限を無効化
python generate_compose.py --enable-time-window false
誤検出が多すぎる
原因: - 感度が高すぎる - 航空機や昆虫を検出
対策:
# 感度を下げる
python generate_compose.py --sensitivity low
# 画面下部を除外
python generate_compose.py --exclude-bottom 0.125
CPUが高い
対策:
# 処理スケールを下げる
python generate_compose.py --scale 0.25
# カメラ数を減らす
# streamersファイルから一部削除
ディスク容量が足りない
対策:
# クリップ動画保存を無効化
# docker-compose.ymlで EXTRACT_CLIPS=false
# バッファを減らす
python generate_compose.py --buffer 10
# 古いファイルを削除
./meteor-docker.sh clean
バージョン別新機能
v3.2.1 - 手動録画一覧表示改善
手動録画の一覧表示を改善。manual_recordings/<camera>/ 配下の録画ファイルが正しくリストアップされるよう修正。
v3.2.0 - 手動録画機能
新機能:
- ダッシュボードから任意タイミングで録画予約が可能(録画予約 UI)
- 手動録画の保存先: manual_recordings/<camera>/
v3.1.0 - WebRTC/go2rtc サポート
新機能:
- generate_compose.py に --streaming-mode webrtc オプションを追加
- --go2rtc-candidate-host <IP> でWebRTC candidateホストを上書き指定可能(未指定時は自動検出)
- go2rtc.yaml の自動生成(--go2rtc-config で出力先変更可)
- ダッシュボード環境変数 CAMERA1_STREAM_KIND=webrtc / CAMERA1_STREAM_URL によるWebRTC埋め込み表示
使用例:
python generate_compose.py \
--streamers streamers \
--streaming-mode webrtc \
--go2rtc-candidate-host 192.168.1.10
v1.16.0 - 画面端ノイズ除外
新規パラメータ:
- EXCLUDE_EDGE_RATIO(環境変数、デフォルト: 0.0、範囲: 0.0-0.2)
- --exclude-edge-ratio(コマンドライン引数)
機能: 画面四辺(上下左右)から指定割合を除外し、端部のノイズや歪みによる誤検出を防止
使用例:
python generate_compose.py --exclude-edge-ratio 0.05
ダッシュボードから即時反映可能(再起動不要)
v1.14.0 - 録画マージン設定
新規パラメータ:
- clip_margin_before: 検出前の追加録画時間(秒)
- clip_margin_after: 検出後の追加録画時間(秒)
機能: 流星検出イベントの前後に余裕を持たせて録画
デフォルト値: 0.0秒(両方)
推奨値: 0.5秒(両方)
使用例:
environment:
- CLIP_MARGIN_BEFORE=0.5
- CLIP_MARGIN_AFTER=0.5
ダッシュボードから即時反映可能(再起動不要)
v1.13.0 - 全カメラ設定UI
新機能:
- /settings ページによる全カメラへの一括設定
- 設定差分のハイライト表示
- output/runtime_settings/<camera>.json への永続化
即時反映項目(再起動不要): - 検出パラメータ(diff_threshold, min_brightness, min_linearity等) - ノイズ除外パラメータ - マスク設定 - 録画マージン設定(v1.14.0+) - 画面端除外設定(v1.16.0+)
自動再起動項目(再ビルド不要): - sensitivity, scale, buffer, extract_clips
メリット: - Docker再ビルド不要で設定変更可能 - 設定が永続化され、再起動後も維持 - 複数カメラへの設定を一括適用
v1.12.0 - ノイズ帯マスク
新規パラメータ:
- nuisance_mask_image: 事前生成済みノイズ帯マスク画像
- nuisance_from_night: 夜間画像からマスク自動生成
- nuisance_dilate: マスク拡張ピクセル数(デフォルト: 3)
- nuisance_overlap_threshold: 重複率閾値(デフォルト: 0.3)
機能: 電線、部分照明など固定された線状ノイズを除外
通常マスクとの違い: - 通常マスク: 領域内の検出を完全に無効化 - ノイズ帯マスク: 軌跡がノイズ帯と一定以上重複した場合のみ除外
使用例:
environment:
- NUISANCE_FROM_NIGHT=/app/night_with_wires.jpg
- NUISANCE_DILATE=5
- NUISANCE_OVERLAP_THRESHOLD=0.25
ダッシュボードから閾値を即時調整可能
関連ドキュメント
- OPERATIONS_GUIDE.md - 運用ガイド
- DETECTOR_COMPONENTS.md - 検出アルゴリズム詳細
- DOCKER_ARCHITECTURE.md - Docker構成
- SECURITY.md - セキュリティガイド